Johnny Appleseed GPS - The Theory and Practice of GPS
GPS is one of the most fantastic utilities ever devised by man. GPS will figure in history alongside the development of the sea-going chronometer. This device enabled seafarers to plot their course to an accuracy that greatly encouraged maritime activity, and led to the migration explosion of the nineteenth century. GPS will affect mankind in the same way. There are myriad applications, that will benefit us individually and collectively.
Latitude, Longitude, AMG etc etc etc: I get many requests to explain the different numbers used by different GPS at the same location. This is a valid and sensible question, and there are easily understood answers. You may also wonder about terms such as UTM, GDA, MGA, datum, position format, grid, and true north. My customers get free assistance with these, and any other matter relating to their purchase, and the use of the GPS.

What is GPS?
The global positioning system is a satellite-based navigation system consisting of a network of 24 orbiting satellites that are eleven thousand nautical miles in space and in six different orbital paths. The satellites are constantly moving, making two complete orbits around the Earth in just under 24 hours. If you do the math, that's about 2.6 kilometres per second. That's really moving!
The GPS satellites are referred to as NAVSTAR satellites. Of course, no GPS introduction would be complete without learning the really neat stuff about the satellites too! The first GPS satellite was launched way back in February 1978.
Each satellite weighs approximately 1 tonne and is about 5 metres across with the solar panels extended. Transmitter power is only 50 watts or less!
Each satellite transmits on three frequencies. Civilian GPS uses the 'L1' frequency of 1575.42 MHz.
Each satellite is expected to last approximately 10 years. Replacements are constantly being built and launched into orbit. The satellite orbits are roughly 25,000 kilometres from the earth's centre or 20,000 km above the earth's surface.
The orbital paths of these satellites take them between roughly 60 degrees North and 60 degrees South latitudes. What this means is you can receive satellite signals anywhere in the world, at any time. As you move closer to the poles (on your next North Pole or Antarctic expedition!), you will still pick up the GPS satellites. They just won't be directly overhead anymore. This may affect the satellite geometry and accuracy but only slightly.
One of the biggest benefits over previous land-based navigation systems is GPS works in all weather conditions. No matter what your application is, when you need it the most, when you're most likely to get lost, your GPS receiver will keep right on working, showing right where you are!
GPS History
How did the technology evolve? You know from your history books that Mr Marconi figured greatly in the understanding of the electro-magnetic energy we know as radio. This technology was applied during the 1920's by the establishment of radio stations, for which you needed a receiver. The same applies for GPS- you only need a rather special radio receiver. Significant advances in radio were bolstered by large sums of money during and after the Second World War (for eavesdropping and communications necessities) and were even more advanced by the need for communications with early satellites and rockets and general space exploration. The technology to receive radio signals in a small hand-held, from 20,000kms away, is indeed amazing.
So what information does a GPS satellite transmit? The GPS signal contains a 'pseudo-random code', ephemeris (pronounced: ee-fem-er-iss) and almanac data. The pseudo-random code identifies which satellite is transmitting - in other words, an I.D. code. Ephemeris data is constantly transmitted by each satellite and contains important information such as the status of the satellite (healthy or unhealthy), current date, and time. Without this part of the message, your GPS receiver would have no idea what the current time and date are. This part of the signal is essential to determining a position, as we'll see in a moment.
The almanac data tells the GPS receiver where each GPS satellite should be at any time throughout the day. Each satellite transmits almanac data showing the orbital information for that satellite and for every other satellite in the system.
By now the overall picture of how GPS works should be getting much clearer. (Clear as mud, right?) Each satellite transmits a message which essentially says, "I'm satellite #X, my position is currently Y, and this message was sent at time Z." Of course, this is a gross oversimplification, but you get the idea. Your GPS receiver reads the message and saves the ephemeris and almanac data for continual use. This information can also be used to set (or correct) the clock within the GPS receiver.
Now, to determine your position the GPS receiver compares the time a signal was transmitted by a satellite with the time it was received by the GPS receiver. The time difference tells the GPS receiver how far away that particular satellite is. If we add distance measurements from a few more satellites, we can triangulate our position. This is exactly what a GPS receiver does. With a minimum of three satellites, your GPS receiver can determine a latitude/longitude position - what's called a 2D position fix. With four or more satellites, a GPS receiver can determine a 3D position which includes latitude, longitude, and altitude. By continuously updating your position, a GPS receiver can also accurately provide speed and direction of travel (referred to as 'ground speed' and 'ground track').
Accuracy is a relative term of course. If you want to locate a fishing spot, 10 metres is probably fine. But if you want to determine a survey boundary peg, we might need 2 cms. 10 metres, as it happens is fairly typical of current GPS accuracy (since 1 May 2000). The first source of position error used to be Selective Availability (or SA), but as of 1 May 2000, this was deliberately cancelled. SA created inaccuracies up to 100 metres in an intentionally imposed degradation on the accuracy of civilian GPS by the U.S. Department of Defense. The rationale behind SA was to deny hostile military or terrorist organisations the maximum accuracy benefits of GPS. Now that SA is gone, we can look forward to more productive and safer use of GPS.
Other factors will affect accuracy but may become significant only when looking for accuracies better than 10-15 metres. These factors are satellite geometry (relative positions of each satellite in the sky, units expressed as DOP), multi-pathing (where satellite reception is blocked or reflected by buildings etc), and propagation delay due to atmospheric effects. There will also be internal clock errors. These latter errors will normally have no significance for 10-15 metre users.
GNSS Solutions: Differences between Signal Acquisition and Tracking
Excerpt from article InsideGNSS - January/February 2011 issue
Q: Why is the acquisition of GNSS (global navigation satellite systems) (GPS) signals generally more difficult than tracking and what are the limiting factors?
A: A fairly good analogy of the difference between GNSS signal acquisition and tracking can be found in the rescue of victims of a sunken ship whose location is not accurately known. The first stage of the rescue attempt typically involves an aircraft flying a search pattern, which hopefully encompasses the location where the ship went down. The second stage involves the use of the human eye from the aircraft above, to detect the location of any victims.
Because the human eye is most sensitive in its relatively small area of central vision, the spotter must scan over a vast expanse of ocean, to locate what might be a tiny spot on the ocean's surface. The numerous whitecaps whipped up by the wind in a rough sea appear as "noise" because they hamper the eye's ability to focus.
The process of searching for a person at sea is analogous to the search required for acquisition of a GNSS signal.
However, once the victim is located (acquired), the spotters must keep the person in sight (tracked) for some period of time during rescue operations. The tracking process is generally much easier than acquisition, as the spotter now knows quite accurately where the person is located.
With the centre of the eye's sophisticated tracking ability, the even momentary disappearance of the victim is not a problem, because reliable reacquisition is performed by a search over a smaller area than earlier. The clutter (noise) around it is automatically disregarded by the observer. This type of operation is analogous to tracking a GNSS signal.
The sensitivity for tracking in GPS receivers is generally better (typically about two to five decibels lower in signal power) than for acquisition.
Why does this happen?
When a typical GPS receiver is turned on, the following sequence of operations must occur before the receiver can access the information in a GPS signal and use it to provide a navigation solution:
- Determine which satellites are visible to the antenna.
- Determine the approximate Doppler of each visible satellite.
- Search for the signal in both C/A-code delay and frequency (i.e., Doppler shift).
- Detect a signal and determine its code delay and carrier frequency.
- Track the C/A-code delay and carrier frequency as they change.
Signal Acquisition
The acquisition process consists of Steps 1–4 in the foregoing list. In Steps 1 and 2 the visible satellites and approximate Doppler shifts are usually found using approximate time, approximate receiver position, and almanac data (for satellite position and velocity) — all of which have been previously stored in the receiver. This permits the receiver to establish a frequency search region for each visible satellite and is similar to establishing the region of the ocean to search in the above analogy.
Step 3 requires by far the most computation. The C/A-code search includes correlation with a replica code in the receiver that is precisely time-aligned with the received code.
Alignment of the code is achieved when averaging over a sufficient time period allows the signal-to-noise ratio (SNR) to be built to a usable level. Thus, in addition to the code search, a receiver also needs to search in frequency.
Signal Tracking
Once the cell containing the signal has been detected in Step 4, typical receivers use code and carrier tracking loops in Step 5 to generate error signals that keep the replica and received codes aligned and also keep the receiver tuned to the correct frequency as changes in Doppler occur. However, a discrete approximation to these methods of tracking is to repeatedly compare the values of S in the current signal cell with the values in the eight cells surrounding it.
Although the approximation is somewhat crude, it makes an analysis of tracking sensitivity much easier and does not really falsify our understanding. If the maximum value of S in the surrounding cells exceeds that of the central cell, the cell with that maximum value is declared as the new signal cell. In this way, both the code delay and carrier frequency of the received signal can be tracked by repeatedly performing a local search over only N = 9 cells, each local search resulting in a tracking update.
To summarise, with enough processing, no theoretical limit exists for either acquisition or tracking sensitivity. However, because tracking requires examination of only a local code delay and carrier frequency region (and coherent averaging can be used as well over the full length of data bits in legacy L1 GPS signals), tracking can be made more sensitive than acquisition before cost limits (either in hardware or processing time) are reached.
Similar conclusions can be reached for other GNSS signals, even taking into account differences in their characteristics.
(For Lawrence Weill’s complete answer to this question, including formulas and tables, please download the full article using the link above.)
Copyright © 2011 Gibbons Media & Research LLC, all rights reserved.
Correction techniques for greater accuracy (DGPS)
How accurate is GPS, really? A typical civilian GPS receiver provides 10-15 metre accuracy, depending on a number of satellites available, and the geometry of those satellites. More sophisticated GPS receivers, costing $5,000 or more, can not by themselves, provide any better accuracies. To get within a centimetre or two, they must use correctional information and computing, as well as using more sophisticated radio reception techniques.
Similar correctional information is also available for a typical civilian GPS receiver. Then the accuracy can be improved to one or two metres (in some cases under a metre!) through a process known as Differential GPS (DGPS). DGPS employs a second receiver at a fixed location to compute corrections to the GPS satellite measurements. How are these corrections provided to your GPS receiver? There are a number of free and subscription services available to provide DGPS corrections.
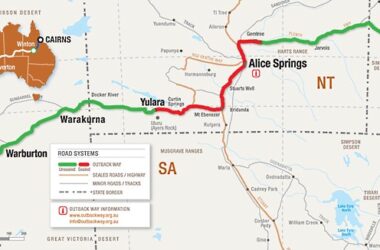
- The Australian Maritime Safety Authority transmit DGPS corrections through marine beacon stations along the Queensland coast (Byron Bay to Weipa), and around Sydney, Melbourne, Adelaide, Perth, Port Hedland and Darwin. These beacons operate in the 283.5 - 325.0 kHz frequency range and are free of charge. Your only cost to use this service is the purchase of a Beacon capable DGPS Receiver. This receiver will receive both the standard GPS signal and the beacon signal and provide a corrected location based on these two signals. This receiver is then coupled to your GPS receiver via a three-wire connection, which relays the corrections in a standard serial data format called 'RTCM SC-104.'
- WAAS provides the GPS receiver with additional satellite ranging to achieve better accuracy and reliability. This system is NOT available in Australia. It is limited to North America.
- Omnistar wide area satellite DGPS signals, covering the whole of Australia and SE Asia. Again, a receiver is purchased, but a license for the ongoing signal is required.
Elevation readings and GPS (How far are we above sea level?)
To combine true elevation readings, and GPS requires the use of something like the Garmin Dakota 20, eTrex 30 or GPSMAP 62S. This GPS have a built-in altimeter, which can give quite accurate (within 3 metres) height readings.
There are two major factors involved in elevation and GPS.
Firstly, what do you mean by elevation? And secondly, is a GPS-derived elevation, as good as a GPS-derived horizontal position?
- GPS primarily indicates a surface (horizontal) position based on a mathematical model representing the earth's near-spherical surface. Height or elevation is a different kettle of fish. GPS can give a distance from the centre of the earth, and then by using the radius of the surface model (see above), give you an elevation from the surface model. Let's call this the mathematical elevation. Then you have to ask, does this represent a height above sea level? The answer is no. It may do so in places, but only by accident.
There are tables of the differences around the world, between the mathematical elevation and sea level elevation. [The spherical (more accurately ellipsoidal) models for GPS and sea level, are called the spheroid, and the geoid, respectively]. These tables are the result of observations taken over the last few centuries, by surveyors, space scientists and geologists.
Geologists get involved in these observations because anomalies in gravity strengths often indicate mineralogy. And gravity strengths relate to the behaviour of level determination on the earth's surface.
- Because the position solution found by GPS is a mathematical one, and the ranging from the satellites is in the order of 20,000 km, there is an error bias in the direction of the earth centre. (Because of intersecting lines that may not quite meet.) This, of course, is the elevation solution.
So if we have an error of 10 metres in the horizontal position, the error in the elevation will be more like 20-30 metres.Your small standard GPS unit usually displays elevation, but you must accept it knowing the above limitations. I can say that it is reasonably sensible. Around the coast of Australia, it will be somewhere around zero, give or take 50 metres. In Toowoomba, it will be about 600 metres. Elsewhere in the world, it may show greater, or lesser discrepancy.
For a more technical explanation of the differences between the GPS surface model (the spheroid), and the sea level surface model (the geoid), you can visit the Geoscience Australia website at ga.gov.au
The theory of positioning (How Sir Isaac Newton and others made GPS possible)
Article was written by Kimball Thurlow, 11/2000, ©, Johnny Appleseed GPS, Brisbane